














 Thomas Dalton
Thomas Dalton 0
0  1424
1424 119
119
 Mikroprozessoren sind das Herzstück aller Computer. Jörg Greuel / Getty Images
Mikroprozessoren sind das Herzstück aller Computer. Jörg Greuel / Getty Images -Der Computer, auf dem Sie diese Seite lesen, verwendet a Mikroprozessor seine Arbeit machen. Der Mikroprozessor ist das Herz eines normalen Computers, egal ob es sich um einen Desktop-Computer, einen Server oder einen Laptop handelt. Der von Ihnen verwendete Mikroprozessor kann ein Pentium, ein K6, ein PowerPC, ein Sparc oder eine der vielen anderen Marken und Arten von Mikroprozessoren sein, aber alle tun ungefähr dasselbe auf ungefähr dieselbe Weise.
Ein Mikroprozessor - auch bekannt als Zentralprozessor oder Zentraleinheit - ist eine vollständige Rechenmaschine, die auf einem einzigen Chip hergestellt wird. Der erste Mikroprozessor war der 1971 eingeführte Intel 4004. Der 4004 war nicht sehr leistungsfähig - alles, was er tun konnte, war zu addieren und zu subtrahieren, und er konnte nur diese 4 Bits gleichzeitig tun. Aber es war erstaunlich, dass alles auf einem Chip war. Vor dem 4004 bauten die Ingenieure Computer entweder aus Chipsammlungen oder aus diskreten Komponenten (Transistoren einzeln verdrahtet). Der 4004 hat einen der ersten tragbaren elektronischen Taschenrechner mit Strom versorgt.
- Wenn Sie sich jemals gefragt haben, was der Mikroprozessor in Ihrem Computer tut, oder wenn Sie sich jemals über die Unterschiede zwischen den Mikroprozessortypen gewundert haben, lesen Sie weiter. In diesem Artikel erfahren Sie, wie relativ einfache digitale Logiktechniken es einem Computer ermöglichen, seine Arbeit zu erledigen, unabhängig davon, ob er ein Spiel spielt oder ein Dokument auf Rechtschreibprüfung überprüft!
Inhalt- Mikroprozessor-Fortschritt: Intel
- Mikroprozessorlogik
- Mikroprozessorspeicher
- Mikroprozessor-Anweisungen
- Leistung und Trends von Mikroprozessoren
- 64-Bit-Mikroprozessoren
 Der Intel 8080 war der erste Mikroprozessor in einem Heimcomputer.
Der Intel 8080 war der erste Mikroprozessor in einem Heimcomputer. Der erste Mikroprozessor, der es in einen Heimcomputer schaffte, war der Intel 8080, ein vollständiger 8-Bit-Computer auf einem Chip, der 1974 eingeführt wurde. Der erste Mikroprozessor, der auf dem Markt für Furore sorgte, war der Intel 8088, der 1979 eingeführt und integriert wurde in den IBM PC (der erstmals um 1982 erschien). Wenn Sie mit dem PC-Markt und seiner Geschichte vertraut sind, wissen Sie, dass sich der PC-Markt vom 8088 zum 80286 zum 80386 zum 80486 zum Pentium zum Pentium II zum Pentium III zum Pentium 4 bewegt hat. All dies Mikroprozessoren werden von Intel hergestellt und sind alle Verbesserungen des Grunddesigns des 8088. Der Pentium 4 kann jeden Code ausführen, der auf dem ursprünglichen 8088 ausgeführt wurde, aber dies geschieht etwa 5.000-mal schneller!
Seit 2004 hat Intel Mikroprozessoren mit mehreren Kernen und Millionen weiterer Transistoren eingeführt. Aber auch diese Mikroprozessoren folgen den gleichen allgemeinen Regeln wie frühere Chips.
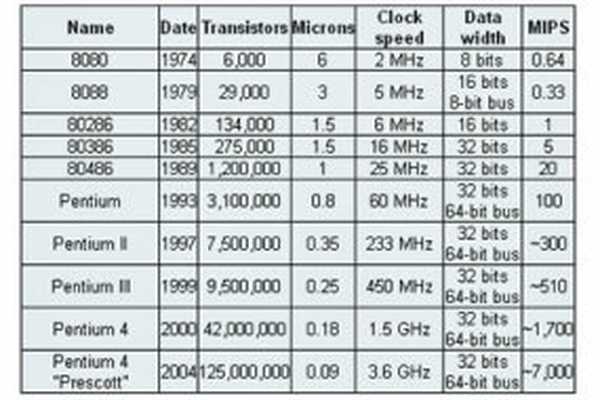 Hier sind die Unterschiede zwischen den verschiedenen Prozessoren, die Intel im Laufe der Jahre eingeführt hat. Zusammengestellt aus dem Intel Microprocessor Quick Reference Guide und den TSCP Benchmark Scores
Hier sind die Unterschiede zwischen den verschiedenen Prozessoren, die Intel im Laufe der Jahre eingeführt hat. Zusammengestellt aus dem Intel Microprocessor Quick Reference Guide und den TSCP Benchmark Scores Zusätzliche Informationen zur Tabelle auf dieser Seite:
- Das Datum ist das Jahr, in dem der Prozessor erstmals eingeführt wurde. Viele Prozessoren werden viele Jahre nach dem ursprünglichen Veröffentlichungsdatum mit höheren Taktraten wieder eingeführt.
- Transistoren ist die Anzahl der Transistoren auf dem Chip. Sie sehen, dass die Anzahl der Transistoren auf einem einzelnen Chip im Laufe der Jahre stetig gestiegen ist.
- Mikron ist die Breite des kleinsten Drahtes auf dem Chip in Mikrometern. Zum Vergleich ist ein menschliches Haar 100 Mikrometer dick. Wenn die Strukturgröße auf dem Chip abnimmt, steigt die Anzahl der Transistoren.
- Taktfrequenz ist die maximale Rate, mit der der Chip getaktet werden kann. Die Taktrate wird im nächsten Abschnitt sinnvoller.
- Datenbreite ist die Breite der ALU. Eine 8-Bit-ALU kann addieren / subtrahieren / multiplizieren / etc. zwei 8-Bit-Zahlen, während eine 32-Bit-ALU 32-Bit-Zahlen bearbeiten kann. Eine 8-Bit-ALU müsste vier Befehle ausführen, um zwei 32-Bit-Zahlen hinzuzufügen, während eine 32-Bit-ALU dies in einem Befehl tun kann. In vielen Fällen hat der externe Datenbus die gleiche Breite wie die ALU, jedoch nicht immer. Der 8088 hatte eine 16-Bit-ALU und einen 8-Bit-Bus, während die modernen Pentiums für ihre 32-Bit-ALUs jeweils 64-Bit-Daten abrufen.
- MIPS steht für "Millionen von Anweisungen pro Sekunde" und ist ein grobes Maß für die Leistung einer CPU. Moderne CPUs können so viele verschiedene Dinge tun, dass MIPS-Bewertungen viel von ihrer Bedeutung verlieren, aber Sie können sich in dieser Spalte einen Überblick über die relative Leistung der CPUs verschaffen.
Aus dieser Tabelle können Sie ersehen, dass im Allgemeinen eine Beziehung zwischen Taktrate und MIPS besteht. Die maximale Taktrate ist eine Funktion des Herstellungsprozesses und der Verzögerungen innerhalb des Chips. Es gibt auch eine Beziehung zwischen der Anzahl der Transistoren und MIPS. Zum Beispiel hat der 8088 mit 5 MHz getaktet, aber nur mit 0,33 MIPS ausgeführt (ungefähr ein Befehl pro 15 Taktzyklen). Moderne Prozessoren können häufig mit einer Rate von zwei Befehlen pro Taktzyklus ausgeführt werden. Diese Verbesserung hängt direkt mit der Anzahl der Transistoren auf dem Chip zusammen und wird im nächsten Abschnitt sinnvoller.
Was ist ein Chip??EIN Chip wird auch als bezeichnet Integrierter Schaltkreis. Im Allgemeinen ist es ein kleines, dünnes Stück Silizium, auf das die Transistoren, aus denen der Mikroprozessor besteht, geätzt wurden. Ein Chip kann auf einer Seite bis zu einem Zoll groß sein und zig Millionen Transistoren enthalten. Einfachere Prozessoren können aus einigen tausend Transistoren bestehen, die nur wenige Millimeter im Quadrat auf einen Chip geätzt sind.
 Intel Pentium 4 Prozessor Foto mit freundlicher Genehmigung der Intel Corporation
Intel Pentium 4 Prozessor Foto mit freundlicher Genehmigung der Intel Corporation Um zu verstehen, wie ein Mikroprozessor funktioniert, ist es hilfreich, nach innen zu schauen und sich mit der Logik vertraut zu machen, mit der ein Mikroprozessor erstellt wurde. Dabei können Sie auch etwas darüber lernen Assemblersprache -- die Muttersprache eines Mikroprozessors - und viele Dinge, die Ingenieure tun können, um die Geschwindigkeit eines Prozessors zu steigern.
Ein Mikroprozessor führt eine Sammlung von Maschinenanweisungen aus, die dem Prozessor mitteilen, was zu tun ist. Basierend auf den Anweisungen macht ein Mikroprozessor drei grundlegende Dinge:
- Mit seiner ALU (Arithmetic / Logic Unit) kann ein Mikroprozessor mathematische Operationen wie Addition, Subtraktion, Multiplikation und Division ausführen. Moderne Mikroprozessoren enthalten vollständige Gleitkommaprozessoren, die äußerst komplexe Operationen mit großen Gleitkommazahlen ausführen können.
- Ein Mikroprozessor kann Daten von einem Speicherort zu einem anderen verschieben.
- Ein Mikroprozessor kann basierend auf diesen Entscheidungen Entscheidungen treffen und zu einem neuen Befehlssatz springen.
Es mag sehr ausgefeilte Dinge geben, die ein Mikroprozessor tut, aber das sind seine drei grundlegenden Aktivitäten. Das folgende Diagramm zeigt einen extrem einfachen Mikroprozessor, der diese drei Dinge ausführen kann:
Dies ist ungefähr so einfach wie ein Mikroprozessor. Dieser Mikroprozessor hat:
- Ein Adressbus (das kann 8, 16 oder 32 Bit breit sein), das eine Adresse an den Speicher sendet
- EIN Datenbus (das kann 8, 16 oder 32 Bit breit sein), die Daten in den Speicher senden oder Daten aus dem Speicher empfangen können
- Ein RD (lesen und WR (Schreib-) Zeile, um dem Speicher mitzuteilen, ob er den adressierten Speicherort festlegen oder abrufen möchte
- EIN Taktleitung Dadurch kann ein Taktimpuls den Prozessor sequenzieren
- EIN Zeile zurücksetzen Dadurch wird der Programmzähler auf Null (oder was auch immer) zurückgesetzt und die Ausführung neu gestartet
Nehmen wir an, dass in diesem Beispiel sowohl der Adress- als auch der Datenbus 8 Bit breit sind.
Hier sind die Komponenten dieses einfachen Mikroprozessors:
- Die Register A, B und C sind einfach Latches aus Flip-Flops. (Weitere Informationen finden Sie im Abschnitt "Flankengetriggerte Latches" unter Funktionsweise der Booleschen Logik.)
- Der Adress-Latch ist genau wie die Register A, B und C..
- Der Programmzähler ist ein Latch mit der zusätzlichen Fähigkeit, bei Aufforderung um 1 zu erhöhen und bei Aufforderung auf Null zurückzusetzen.
- Die ALU kann so einfach wie ein 8-Bit-Addierer sein (Einzelheiten finden Sie im Abschnitt über Addierer unter Funktionsweise der Booleschen Logik), oder sie kann 8-Bit-Werte addieren, subtrahieren, multiplizieren und dividieren. Nehmen wir hier Letzteres an.
- Das Testregister ist ein spezielles Latch, das Werte aus Vergleichen enthalten kann, die in der ALU durchgeführt wurden. Eine ALU kann normalerweise zwei Zahlen vergleichen und feststellen, ob sie gleich sind, ob eine größer als die andere ist usw. Das Testregister kann normalerweise auch ein Übertragsbit von der letzten Stufe des Addierers enthalten. Diese Werte werden in Flip-Flops gespeichert, und dann kann der Befehlsdecoder die Werte verwenden, um Entscheidungen zu treffen.
- Das Diagramm enthält sechs mit "3-State" gekennzeichnete Felder. Diese sind Drei-Zustands-Puffer. Ein Drei-Zustands-Puffer kann eine 1, eine 0 passieren oder seinen Ausgang im Wesentlichen trennen (stellen Sie sich einen Schalter vor, der die Ausgangsleitung vollständig von dem Draht trennt, auf den der Ausgang zusteuert). Ein Drei-Zustands-Puffer ermöglicht die Verbindung mehrerer Ausgänge mit einem Draht, aber nur einer von ihnen kann tatsächlich eine 1 oder eine 0 auf die Leitung treiben.
- Das Befehlsregister und der Befehlsdecoder sind für die Steuerung aller anderen Komponenten verantwortlich.
Obwohl sie in diesem Diagramm nicht gezeigt sind, gibt es Steuerleitungen vom Befehlsdecoder, die:
- Weisen Sie das A-Register an, den aktuell auf dem Datenbus befindlichen Wert zu speichern
- Weisen Sie das B-Register an, den aktuell auf dem Datenbus befindlichen Wert zu speichern
- Weisen Sie das C-Register an, den aktuell von der ALU ausgegebenen Wert zu speichern
- Weisen Sie das Programmzählerregister an, den aktuell auf dem Datenbus befindlichen Wert zu speichern
- Weisen Sie das Adressregister an, den aktuell auf dem Datenbus befindlichen Wert zu speichern
- Weisen Sie das Befehlsregister an, den aktuell auf dem Datenbus befindlichen Wert zu speichern
- Weisen Sie den Programmzähler an, sich zu erhöhen
- Weisen Sie den Programmzähler an, auf Null zurückzusetzen
- Aktivieren Sie einen der sechs Drei-Zustands-Puffer (sechs separate Zeilen).
- Teilen Sie der ALU mit, welche Operation ausgeführt werden soll
- Weisen Sie das Testregister an, die Testbits der ALU zu speichern
- Aktivieren Sie die RD-Leitung
- Aktivieren Sie die WR-Leitung
In den Befehlsdecoder kommen die Bits aus dem Testregister und der Taktleitung sowie die Bits aus dem Befehlsregister.
 ROM-Chip
ROM-Chip Im vorherigen Abschnitt wurden die Adress- und Datenbusse sowie die RD- und WR-Leitungen behandelt. Diese Busse und Leitungen sind entweder mit RAM oder ROM verbunden - im Allgemeinen mit beiden. In unserem Beispielmikroprozessor haben wir einen Adressbus mit einer Breite von 8 Bit und einen Datenbus mit einer Breite von 8 Bit. Dies bedeutet, dass der Mikroprozessor (2) adressieren kann8) 256 Byte Speicher, und es können 8 Bits des Speichers gleichzeitig gelesen oder geschrieben werden. Nehmen wir an, dass dieser einfache Mikroprozessor 128 Byte ROM ab Adresse 0 und 128 Byte RAM ab Adresse 128 hat.
ROM steht für Nur-Lese-Speicher. Ein ROM-Chip wird mit einer permanenten Sammlung voreingestellter Bytes programmiert. Der Adressbus teilt dem ROM-Chip mit, welches Byte abgerufen und auf dem Datenbus platziert werden soll. Wenn die RD-Leitung ihren Zustand ändert, präsentiert der ROM-Chip das ausgewählte Byte auf dem Datenbus.
RAM steht für Direktzugriffsspeicher. Der RAM enthält Informationsbytes, und der Mikroprozessor kann diese Bytes lesen oder schreiben, je nachdem, ob die RD- oder WR-Leitung signalisiert wird. Ein Problem bei heutigen RAM-Chips ist, dass sie nach dem Ausschalten alles vergessen. Deshalb benötigt der Computer ROM.
 RAM-Chip
RAM-Chip Übrigens enthalten fast alle Computer eine gewisse Menge an ROM (es ist möglich, einen einfachen Computer ohne RAM zu erstellen - viele Mikrocontroller tun dies, indem sie eine Handvoll RAM-Bytes auf dem Prozessorchip selbst platzieren -, aber im Allgemeinen unmöglich zu erstellen eine, die kein ROM enthält). Auf einem PC wird das ROM als BIOS (Basic Input / Output System) bezeichnet. Wenn der Mikroprozessor startet, beginnt er mit der Ausführung von Anweisungen, die er im BIOS findet. Die BIOS-Anweisungen testen beispielsweise die Hardware auf dem Computer und gehen dann zur Festplatte, um die Hardware abzurufen Bootsektor (Einzelheiten finden Sie unter Funktionsweise von Festplatten.) Dieser Bootsektor ist ein weiteres kleines Programm, das vom BIOS nach dem Lesen von der Festplatte im RAM gespeichert wird. Der Mikroprozessor beginnt dann, die Anweisungen des Bootsektors aus dem RAM auszuführen. Das Bootsektorprogramm weist den Mikroprozessor an, etwas anderes von der Festplatte in den RAM zu holen, das der Mikroprozessor dann ausführt, und so weiter. Auf diese Weise lädt der Mikroprozessor das gesamte Betriebssystem und führt es aus.
Selbst der im vorherigen Beispiel gezeigte unglaublich einfache Mikroprozessor verfügt über einen ziemlich großen Satz von Anweisungen, die er ausführen kann. Die Sammlung von Befehlen wird als Bitmuster implementiert, von denen jedes eine andere Bedeutung hat, wenn es in das Befehlsregister geladen wird. Menschen können sich nicht besonders gut an Bitmuster erinnern, daher wird eine Reihe von kurzen Wörtern definiert, um die verschiedenen Bitmuster darzustellen. Diese Sammlung von Wörtern heißt die Assemblersprache des Prozessors. Ein Assembler kann die Wörter sehr leicht in ihre Bitmuster übersetzen, und dann wird die Ausgabe des Assemblers im Speicher abgelegt, damit der Mikroprozessor sie ausführen kann.
Hier sind die Anweisungen für die Assemblersprache, die der Designer in unserem Beispiel für den einfachen Mikroprozessor erstellen kann:
- LOADA mem - Laden Sie das Register A aus der Speicheradresse
- LOADB mem - Laden Sie das Register B aus der Speicheradresse
- CONB con - Laden Sie einen konstanten Wert in Register B.
- SAVEB mem - Speichern Sie Register B in der Speicheradresse
- SAVEC mem - Speichern Sie Register C in der Speicheradresse
- HINZUFÜGEN - Addiere A und B und speichere das Ergebnis in C.
- SUB - Subtrahieren Sie A und B und speichern Sie das Ergebnis in C.
- MUL - Multiplizieren Sie A und B und speichern Sie das Ergebnis in C.
- DIV - Teilen Sie A und B und speichern Sie das Ergebnis in C.
- COM - Vergleichen Sie A und B und speichern Sie das Ergebnis im Test
- JUMP addr - Zu einer Adresse springen
- JEQ addr - Springe, wenn gleich, zur Adresse
- JNEQ addr - Zur Adresse springen, wenn nicht gleich
- JG addr - Springe, wenn größer als, zur Adresse
- JGE addr - Springe, wenn größer oder gleich, zur Adresse
- JL addr - Springe, wenn weniger als, zur Adresse
- JLE addr - Springe, wenn kleiner oder gleich, zur Adresse
- HALT - Stoppen Sie die Ausführung
Wenn Sie gelesen haben, wie die C-Programmierung funktioniert, wissen Sie, dass dieser einfache Teil des C-Codes die Fakultät 5 berechnet (wobei die Fakultät 5 = 5! = 5 * 4 * 3 * 2 * 1 = 120):
a = 1; f = 1; während (a <= 5) f = f * a; a = a + 1;
Am Ende der Programmausführung die Variable f enthält die Fakultät von 5.
Assemblersprache
EIN C-Compiler übersetzt diesen C-Code in Assemblersprache. Angenommen, RAM beginnt in diesem Prozessor bei Adresse 128 und ROM (das das Assembler-Programm enthält) bei Adresse 0, dann könnte die Assemblersprache für unseren einfachen Mikroprozessor folgendermaßen aussehen:
// Angenommen, a befindet sich an der Adresse 128 // Angenommen, F befindet sich an der Adresse 1290 CONB 1 // a = 1; 1 SAVEB 1282 CONB 1 // f = 1; 3 SAVEB 1294 LOADA 128 // wenn a> 5 der Sprung zu 175 CONB 56 COM7 JG 178 LOADA 129 // f = f * a; 9 LOADB 12810 MUL11 SAVEC 12912 LOADA 128 // a = a + 1; 13 CONB 114 ADD15 SAVEC 12816 JUMP 4 // Schleife zurück zu if17 STOP
Rom
Die Frage lautet nun: "Wie sehen all diese Anweisungen im ROM aus?" Jede dieser Assembler-Anweisungen muss durch eine Binärzahl dargestellt werden. Nehmen wir der Einfachheit halber an, dass jeder Assembler-Befehl eine eindeutige Nummer erhält, wie folgt:
- LOADA - 1
- LAST - 2
- CONB - 3
- SAVEB - 4
- SAVEC mem - 5
- HINZUFÜGEN - 6
- SUB - 7
- MUL - 8
- DIV - 9
- COM - 10
- JUMP addr - 11
- JEQ-Adresse - 12
- JNEQ addr - 13
- JG addr - 14
- JGE-Adresse - 15
- JL addr - 16
- JLE-Adresse - 17
- STOP - 18
Die Zahlen sind bekannt als Opcodes. Im ROM würde unser kleines Programm so aussehen:
// Angenommen, a befindet sich an der Adresse 128 // Angenommen, F befindet sich an der Adresse 129Addr opcode / value0 3 // CONB 11 12 4 // SAVEB 1283 1284 3 // CONB 15 16 4 // SAVEB 1297 1298 1 // LOADA 1289 12810 3 // CONB 511 512 10 // COM13 14 // JG 1714 3115 1 // LOADA 12916 12917 2 // LOADB 12818 12819 8 // MUL20 5 // SAVEC 12921 12922 1 // LOADA 12823 12824 3 // CONB 125 126 6 // ADD27 5 // SAVEC 12828 12829 11 // JUMP 430 831 18 // STOP
Sie können sehen, dass aus sieben Zeilen C-Code 18 Zeilen Assemblersprache und im ROM 32 Byte wurden.
Dekodierung
Der Befehlsdecoder muss jeden der Opcodes in einen Satz von Signalen umwandeln, die die verschiedenen Komponenten im Mikroprozessor ansteuern. Nehmen wir als Beispiel die ADD-Anweisung und schauen wir uns an, was sie tun muss:
- Während des ersten Taktzyklus müssen wir den Befehl tatsächlich laden. Daher muss der Befehlsdecoder: den Drei-Zustands-Puffer für den Programmzähler aktivieren, die RD-Leitung aktivieren, den Daten-in-Drei-Zustands-Puffer aktivieren, den Befehl in das Befehlsregister einrasten
- Während des zweiten Taktzyklus wird der ADD-Befehl decodiert. Es muss sehr wenig getan werden: Stellen Sie den Betrieb der ALU so ein, dass der Ausgang der ALU zusätzlich im C-Register gespeichert wird
- Während des dritten Taktzyklus wird der Programmzähler inkrementiert (theoretisch könnte dies mit dem zweiten Taktzyklus überlappen)..
Jeder Befehl kann in eine Reihe solcher sequenzierter Operationen unterteilt werden, die die Komponenten des Mikroprozessors in der richtigen Reihenfolge manipulieren. Einige Anweisungen, wie diese ADD-Anweisung, können zwei oder drei Taktzyklen dauern. Andere benötigen möglicherweise fünf oder sechs Taktzyklen.
Die Anzahl der Transistoren verfügbar hat einen großen Einfluss auf die Leistung eines Prozessors. Wie bereits erwähnt, dauerte die Ausführung eines typischen Befehls in einem Prozessor wie einem 8088 15 Taktzyklen. Aufgrund des Designs des Multiplikators dauerte es ungefähr 80 Zyklen, um eine 16-Bit-Multiplikation auf dem 8088 durchzuführen. Mit mehr Transistoren werden viel leistungsstärkere Multiplikatoren möglich, die Einzelzyklusgeschwindigkeiten ermöglichen.
Weitere Transistoren ermöglichen auch eine Technologie namens Pipelining. In einer Pipeline-Architektur überlappt sich die Befehlsausführung. Obwohl es fünf Taktzyklen dauern kann, um jeden Befehl auszuführen, kann es fünf Befehle in verschiedenen Ausführungsstufen gleichzeitig geben. Auf diese Weise sieht es so aus, als ob ein Befehl jeden Taktzyklus abschließt.
Viele moderne Prozessoren verfügen über mehrere Befehlsdecoder mit jeweils einer eigenen Pipeline. Dies ermöglicht mehrere Befehlsströme, was bedeutet, dass mehr als ein Befehl während jedes Taktzyklus abgeschlossen werden kann. Die Implementierung dieser Technik kann sehr komplex sein, daher sind viele Transistoren erforderlich.
Trends
Der Trend beim Prozessordesign ging in erster Linie zu vollständigen 32-Bit-ALUs mit eingebauten schnellen Gleitkommaprozessoren und einer Pipeline-Ausführung mit mehreren Befehlsströmen. Das Neueste im Prozessordesign sind 64-Bit-ALUs, und es wird erwartet, dass diese Prozessoren in den nächsten zehn Jahren auf ihren Heim-PCs installiert werden. Es gab auch eine Tendenz zu speziellen Anweisungen (wie den MMX-Anweisungen), die bestimmte Operationen besonders effizient machen, und zur Hinzufügung von Unterstützung für virtuellen Hardware-Speicher und L1-Caching auf dem Prozessorchip. All diese Trends erhöhen die Anzahl der Transistoren und führen zu den heute verfügbaren Millionen-Transistor-Kraftpaketen. Diese Prozessoren können ungefähr eine Milliarde Anweisungen pro Sekunde ausführen!
 Foto mit freundlicher Genehmigung von AMD
Foto mit freundlicher Genehmigung von AMD 64-Bit-Prozessoren sind seit 1992 bei uns und im 21. Jahrhundert haben sie begonnen, sich zu etablieren. Sowohl Intel als auch AMD haben 64-Bit-Chips eingeführt, und der Mac G5 verfügt über einen 64-Bit-Prozessor. 64-Bit-Prozessoren verfügen über 64-Bit-ALUs, 64-Bit-Register, 64-Bit-Busse usw..
Ein Grund, warum die Welt 64-Bit-Prozessoren benötigt, sind ihre vergrößerte Adressräume. Zweiunddreißig-Bit-Chips sind häufig auf maximal 2 GB oder 4 GB RAM-Zugriff beschränkt. Das klingt nach viel, da die meisten Heimcomputer derzeit nur 256 MB bis 512 MB RAM verwenden. Ein Limit von 4 GB kann jedoch ein ernstes Problem für Servercomputer und Computer sein, auf denen große Datenbanken ausgeführt werden. Und selbst Heimcomputer werden bald gegen das 2-GB- oder 4-GB-Limit stoßen, wenn sich die aktuellen Trends fortsetzen. Ein 64-Bit-Chip weist keine dieser Einschränkungen auf, da ein 64-Bit-RAM-Adressraum auf absehbare Zeit im Wesentlichen unendlich ist - 2 ^ 64 Byte RAM liegen in der Größenordnung von einer Milliarde Gigabyte RAM.
Mit einem 64-Bit-Adressbus und breiten Hochgeschwindigkeitsdatenbussen auf der Hauptplatine bieten 64-Bit-Computer auch schnellere E / A-Geschwindigkeiten (Eingabe / Ausgabe) für Festplatten und Grafikkarten. Diese Funktionen können die Systemleistung erheblich steigern.
Server können definitiv von 64 Bit profitieren, aber was ist mit normalen Benutzern? Über die RAM-Lösung hinaus ist nicht klar, dass ein 64-Bit-Chip "normalen Benutzern" derzeit echte, greifbare Vorteile bietet. Sie können Daten (sehr komplexe Daten enthalten viele reelle Zahlen) schneller verarbeiten. Menschen, die Videos bearbeiten, und Menschen, die Fotos mit sehr großen Bildern bearbeiten, profitieren von dieser Art von Rechenleistung. High-End-Spiele profitieren ebenfalls, wenn sie neu codiert werden, um die 64-Bit-Funktionen nutzen zu können. Der durchschnittliche Benutzer, der E-Mails liest, im Internet surft und Word-Dokumente bearbeitet, verwendet den Prozessor jedoch nicht wirklich auf diese Weise.
Weitere Informationen zu Mikroprozessoren und verwandten Themen finden Sie unter den Links auf der nächsten Seite.
Verwandte Artikel
- CPU-Quiz
- Warum gibt es Grenzen für die CPU-Geschwindigkeit??
- Wie Halbleiter funktionieren
- Wie PCs funktionieren
- So funktioniert die C-Programmierung
- Wie Java funktioniert
- Funktionsweise von Betriebssystemen
- So funktioniert der Computerspeicher
- Wie Quantencomputer funktionieren
- Wie DNA-Computer funktionieren
Weitere großartige Links
- Webopedia: Mikroprozessor
- Klicken Sie auf CPU
- Prozessor-Upgrades
- CPU-Vergleiche der 6. Generation
- CPU-Vergleiche der 7. Generation
- TSCP Benchmark Scores